")
")

Après le décès de Simon Bouisset, en mai 2019, la SB a décidé que l’un des prochains articles de ce livret « pionniers en biomécanique » rendrait hommage à celui à qui notre Société doit tant. L’idée s’est vite imposée de confier cet article à ceux qui ont si longtemps travaillé avec Simon et l’on accompagné jusqu’à la fin : Serge Le Bozec et Manh-Cuong Do.
La Biomécanique du Mouvement : Quand il s’agit d’articuler les principes et concepts de la Mécanique avec ceux de la Physiologie et des Sciences Cognitives.
Aspects et bases de la méthode électromyographique
L’électromyographie est, au sens étymologique, l’enregistrement des phénomènes électriques qui ont lieu dans les muscles. Tout au long du XVIIIè siècle la question des phénomènes physiques et chimiques œuvrant dans le mouvement musculaire a été largement débattue chez les naturalistes. C'est la découverte de la bouteille de Leyde, en 1745, qui fait surgir la question, de l'action possible du "fluide électrique" sur les corps vivants. En effet, les décharges de la bouteille de Leyde provoquant de fortes contractions musculaires et des sensations inattendues, la question s’est posée de son action pour la guérison des paralysies et d'autres maladies ?
Dès la fin du XVIIIè siècle les machines électriques se multiplient dans les hôpitaux, et de nombreuses guérisons par l'électricité sont annoncées dans les journaux. Parallèlement l'électricité médicale est également pratiquée par des hommes qui ne sont ni médecins ni physiciens et des démonstrateurs d'électricité amusante se font électriciens guérisseurs.
Mais la réalité des guérisons observées est très discutée par plusieurs savants et la "science électrique" apparaît dans le domaine de la physiologie animale. C'est ainsi qu'en 1756, à Padoue, Caldani étudie les effets de la décharge électrique sur le cœur et sur divers muscles, la grenouille se révélant alors être l'animal le plus sensible pour mettre en évidence l'action de l'électricité sur les nerfs.
L’idée d'une analogie entre fluide nerveux et fluide électrique fait son chemin, et les premiers fondements d’une base physiologique de l’électromyographie sont évoqués dès 1791 dans l’ouvrage de Galvani « De Viribus Electricitatis in Motu Musculari Commentarius » (« commentaire sur les forces électriques dans le mouvement musculaire »).
Les expériences du physiologiste Emil Heinrich du Bois Reymond, réalisées après sa thèse soutenue en 1843, viennent confirmer l’idée de Galvani, en démontrant que le courant développé par la contraction d’un muscle peut déterminer la contraction d'un autre muscle par l'intermédiaire de son nerf. Ce n’est qu’au début du XXè siècle que Willem Einthoven crée le galvanomètre à cordes capable de détecter et d’enregistrer les faibles courants électriques produits par le cœur humain. Cet appareil innovant est l’équivalent du premier électrocardiographe et lui permet de mettre en évidence sur le tracé électro-cardiographique cinq ondes qu’il nomme respectivement P, Q, R, S, T, correspondant aux diverses phases de contraction du muscle.
L’approche physiologique
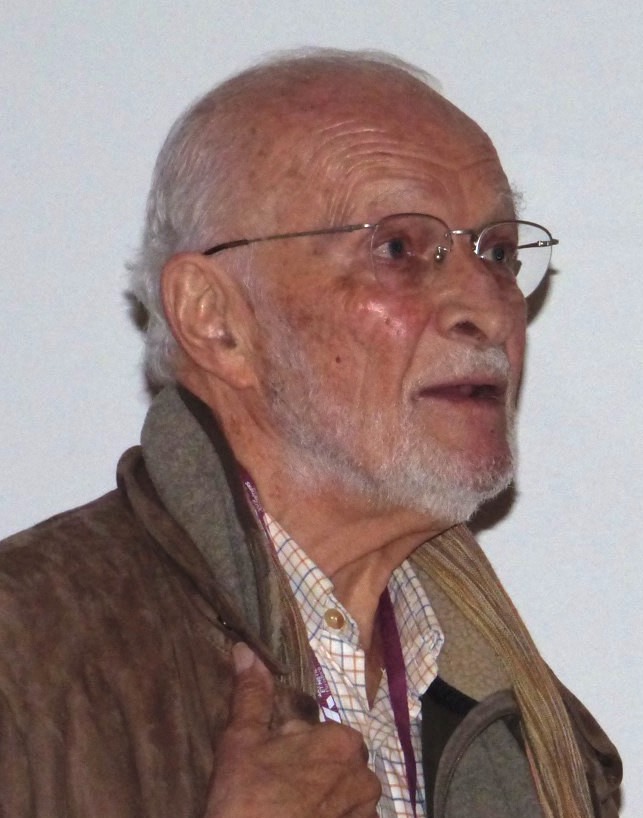
Le premier à avoir exprimé la nécessité d’une coopération plus ou moins complexe des muscles pour mouvoir une partie du corps semble être Winslow en 1732. Néanmoins, c’est à Duchenne de Boulogne (1867) que nous devons les premières descriptions de certaines fonctions motrices qui sous-tendent l’exécution de mouvements (Fig.1). En effet, en étudiant les contractions musculaires produites par des stimulations électriques, il put déterminer l’action de différents muscles ou groupes musculaires.
Dès lors, les premiers enregistrements effectués par Piper en 1912, sur les muscles épitrochléens, et l’analyse électrophysiologique du réflexe monosynaptique par Hoffmann en 1910 (nommé réflexe H en référence à la lettre initiale de son nom) vont faire évoluer les techniques. Aujourd’hui, la détection, l’enregistrement et le traitement du signal électromyographique constituent, de fait, trois aspects intimement liés de la technique électromyographique.
La période d’entre-deux-guerres est marquée par des progrès techniques considérables. Liddell et Sir Charles Sherrington proposent en 1925 le terme d'unité motrice pour représenter l'ensemble des fibres musculaires innervées par le même motoneurone et l'électromyographie progresse grâce notamment à l’introduction de l’électrode concentrique par Adrian et Bronk en 1929. Leurs premiers travaux concernent la gradation de la contraction volontaire dans le triceps humain avec l'augmentation de fréquence des potentiels individualisés, puis l'apparition de potentiels de plus en plus nombreux caractérisant le début de 1’électromyographie élémentaire.
Les différentes modalités de l’électromyographie
Ce n’est qu’avec les premiers enregistrements électromyographiques de Wachholder (1923) et Wachholder et Altenburger (1925, 1926) qu’une analyse des mouvements volontaires simples et l’étude des synergies musculaires qui les sous-tendent furent effectuées.
En effet, entre 1923 et 1927, Kurt Wachholder et son collaborateur Hans Altenburger publient plusieurs articles concernant les études électrophysiologiques et cinématiques sur les mouvements humains volontaires. Le nom de Wachholder apparaît comme un pionnier de l’électromyographie même si ses études sont restées largement inaperçues, car écrites en allemand. Il a été en effet le premier à signaler le pattern triphasique dans les mouvements simples et rythmiques (Wachholder et Altenburger, 1926).
Par la suite, grâce au perfectionnement des conditions d’amplification et d’enregistrement, notamment les travaux de Matthews, Offner, Schmidt et Tönnies, des progrès considérables ont lieu, et aboutissent aux premiers travaux d’électromyographie élémentaire en pathologie neuromusculaire. C’est ainsi qu’en 1938, Denny Brown et Pennybacker publient dans Brain un rapport original sur les potentiels de fibrillation et de fasciculation qui sera suivi ultérieurement par d’autres études décrivant la plupart des changements électriques nécessaires pour effectuer et interpréter l’électromyogramme (EMG).
En 1941, paraît le premier travail montrant l'intérêt de l'é1ectromyographie é1émentaire dans la pathologie neuromusculaire, signé par Fritz Buchthal et Svend Clemmesen, sur la différenciation de l’atrophie musculaire par électromyographie. Au cours des années qui suivent la seconde guerre mondiale, l’électromyographie clinique poursuit son développement avec notamment les travaux de Kukelberg, et prend sa place parmi les explorations fonctionnelles avec aujourd’hui l’EMG ou l’ENMG pour les recherches entre-autres d’atteintes du système nerveux périphérique et des symptômes associés.
Depuis lors, et grâce notamment au développement des techniques électromyographiques, l’étude de l’EMG élémentaire et les mécanismes de gradation de la contraction évoluent. L’utilisation de l’électromyographie de surface intervient dans ce contexte et répond à deux objectifs : identifier les muscles actifs et tenter d’évaluer la force exercée par chaque muscle.
Approche des mécanismes du contrôle du mouvement
Les premiers travaux sur les mécanismes du contrôle du mouvement concernent la coordination musculaire et l’organisation nerveuse qui détermine les modalités selon lesquelles les muscles vont être excités. D’après ces travaux, il semblerait que la coordination musculaire puisse se caractériser par une grande plasticité ou au contraire par une grande stabilité selon les conditions périphériques d’exécution du mouvement. La notion de plasticité musculaire a été particulièrement bien mise ne évidence dans le cas de la synergie entre les muscles fléchisseurs des doigts et les muscles extenseurs de la main par Fessard et al. (1950), Livingston et al. (1951), Tournay et Paillard (1952). La neurophysiologie française, qui avait pris un retard considérable entre les deux guerres mondiales, doit à Fessard une impulsion salutaire. Les stages qu'il effectue dans les années 1930 à Cambridge (Royaume-Uni) et les voyages d'études qu'il fait après la Seconde Guerre mondiale aux États-Unis le poussent à développer en France l'utilisation des méthodes électrophysiologiques. C'est pourquoi, au-delà de ses deux pôles d'intérêt personnel, il œuvre pour qu'une large place soit donnée à des investigations électrophysiologiques pour l'analyse de divers aspects fonctionnels du système nerveux central.
L’arrivée de Simon Bouisset en 1954 au Laboratoire de Physiologie du Travail du CNAM, et sa nomination comme Professeur de Physiologie animale à l'Université de Lille I en 1959, sont à l’origine des enseignements de base rigoureux de physiologie qui ont permis l’essor de l’Ergonomie et les nombreuses recherches qui en ont découlées. Par la suite, dès 1975 ses propositions au sein du Laboratoire de Physiologie du Mouvement à Orsay ont permis de croiser la Biomécanique, non seulement avec l’Anatomie, comme il est usuel de le faire, mais aussi avec les Neurosciences cognitives, en l’occurrence la Neurophysiologie et la Psychologie expérimentale. En adoptant un tel cadre conceptuel Simon Bouisset a pu intégrer les données de l’observation à celles de l’expérimentation dans une cohérence scientifique, pour étudier les mouvements du corps et de ses parties, grâce à la plate-forme de force créée au laboratoire (Fig. 2 et Fig.3).
Simon Bouisset s’est beaucoup appuyé sur Etienne Jules Marey qui a mis au point les premières méthodes biomécaniques, et a conçu et réalisé la première plateforme de force de l’histoire de la biomécanique, la « table dynamométrique » (E.J. Marey, 1883) voir Fig.4. C’est lui qui a fait ressortir l’ambiguïté entre tâche et mouvement, en s’appuyant sur l’exemple des mouvements sportifs, professionnels et pathologiques. Il s’est également appuyé sur les travaux de Nikolai Aleksandrovitch Bernstein (1896-1966) qui apparaît comme le père de la Biomécanique moderne : la « Biomécanique cognitive », consacrée notamment à la compréhension des processus de commande du mouvement.
Au total, l’étude du mouvement qu’il a abordé par la suite lui a permis d’associer la Physiologie et la Biomécanique, en s’intéressant tant à l’aspect fondamental qu’aux applications médicales, ergonomiques et sportives. Son thème de recherche : les relations entre posture équilibre et mouvement, s'inscrit dans la continuité des nombreux travaux qu’il a mené sur les ajustements posturaux anticipateurs et les synergies musculaires.
Les processus de commande de l’EMG élémentaire et les méanismes de gradation de la contraction
Les modalités d’analyse des résultats peuvent être très différents selon que l’on considère l’EMG élémentaire ou l’EMG global. Une très importante littérature concernant les différents types d’électrodes ainsi-que les modes de dérivation, et de façon plus générale, les questions de technique, a été analysée dans la thèse de Maton (1970), et il faut distinguer entre les électrodes utilisées en électromyographie intramusculaire, électrodes aiguilles ou électrodes-fils et celles utilisées en électromyographie de surface, électrodes cutanées ou sous-cutanées. L’électrode multiple, originalement conçue par Buchthal et al. (1957), puis modifiée par Ekstedt et Stälberg (1970) était principalement destinée à déterminer le volume de propagation de l’unité motrice ou le potentiel d’action de fibre musculaire unique. La seule technique d’électromyographie intramusculaire utilisable au cours du mouvement est celle des électrodes-fils. Ces électrodes sont constituées par un ou deux fils métalliques souples, introduits dans le muscle à l’aide d’une aiguille hypodermique, qui est ensuite retirée. Cette méthode a bien été décrite par Basmajian et Stecko (1962), Basmajian et al (1966) et dans la thèse de Maton (1970). Des variantes de la technique de Basmajian ont été proposées ensuite par Maton et al (1969) et Maton (1977) pour étudier l’activité des unités motrices pendant des contractions d’intensité élevée ou pendant le mouvement. Au cours de cette période, les phénomènes du recrutement spatial et du recrutement temporel des unités motrices dans les différentes modalités de la contraction volontaire et au cours de la fatigue ont été très étudiés. Ils ont donné lieu à de nombreuses publications, Maton (1976, 1977, 1980, 1981), Maton et Bouisset (1972, 1975, 1977), Maton et Gamet (1989), Le Bozec et Maton (1987).
Les processus d’élaboration de la coordination musculaire
L’étude des plans de coopération musculaire ainsi-que les différentes interprétations des mécanismes neurophysiologistes qui les sous-tendent débutent à partir des années 1950 avec Fessard et al. (1950) , Livingston et al. (1951), Tournay et Paillard (1951). L’intérêt très large porté à ces mouvements monoarticulés provient de l’hypothèse selon laquelle la commande de ce mouvement simple pourrait constituer l’unité de coordination musculaire.
On doit à Bouisset (1973) le concept de mucle équivalent qui correspond à la réduction d’un système musculo-squelettique complexe à un plus simple. Il permet le calcul de la force exercée par un groupe musculaire au cours d’un mouvement monoarticulé et est confirmé par les travaux de Hallet et al (1975), Maton et Bouisset (1977), Bouisset et al (1977), Lestienne (1979) sur la synergie des muscles fléchisseurs et extenseurs du coude (Fig. 5). Ces travaux montrent que celle-ci est caratérisée par une grande stabilité dans la mesure oû la chronologie des activités ne change pas lorsque les conditions externes du mouvement (vitesse, inertie) varient. On doit toutefois remarquer que cette synergie des muscles fléchisseurs peut-être aussi plastique dans la mesure oû le niveau d’excitation des ces muscles se modifie lorsque les conditions posturales d’exécution du mouvement (pronation-supination) varient (Maton et Bouisset, 1977).
Admettre l’existence d’un rapport constant entre le couple exercé par le muscle équivalent et le couple externe implique que le couple exercé par le muscle équivalent est proportionnel, ou bien à la résultante des couples exercés par l’ensemble des autres muscles, ou bien par chacun de ces muscles en particulier. Le concept de muscle équivalent repose donc nécessirement sur une hypothèse concernant la mise en jeu des différents muscles, c’est-à-dire des modalités de la commande. La plus simple d’entre elles consiste dans l’excitation simultanée et proportionnelle des pools de motoneurones des différents muscles. Ce mode de recrutement des différents pools de motoneurones permettrait une simplification de la commande et a été proposée par Le Bozec (1986), à partir des études réalisées sur la synergie des muscles extenseurs du coude Le Bozec et al (1980, 1985, 1987), Duchateau et al (1986), Maton et al 1980, Le Bozec et Maton (1980, 1982, 1987).
En l’absence d’apprentissage, la co-contraction agonistes-antagonistes semble être la règle, dès qu’intervient une exigence de précision. C’est seulement après apprentissage qu’une activité alternée se manifeste (Person, 1960), et se conserve même en l’absence d’activité fusoriale (Sanes et Jennings, 1984). Cependant même si la première bouffée agoniste n’est généralement pas affectée par le feed-back périphérique, en revanche les activités musculaires antagoniste et agoniste qui suivent sont alors modifiées (Wadman et al. 1979).
Relations entre posture, équilibre et mouvement segmentaire
L'étude de l'organisation de la commande du mouvement volontaire chez l'homme s'appuie sur l'analyse des coordinations musculaires qui caractérisent le mouvement lui-même, mais aussi sur celles des ajustements posturaux qui précèdent, accompagnent et suivent le mouvement. Après sa nomination comme Professeur de Physiologie du Travail à l'Université Paris-Sud en 1975, Simon Bouisset s’est intéressé aux relations entre posture, équilibre et mouvement, dans le cas de mouvements segmentaires, ceux pour lesquels la préservation de l’équilibre postural constitue une consigne implicite.
Les recherches menées au Laboratoire de Biomécanique et Physiologie du Mouvement ont porté à la fois sur des modèles expérimentaux « Lever du bras » (S Bouisset et M Zattara), « Initiation de la Marche » (Y Brenière), et « Réactions à une chute » (M-C Do).
Par ailleurs, les travaux sur les ajustements posturaux anticipateurs menées par Bouisset et Zattara (1981, 1983, 1987), Zattara et Bouisset (1986, 1988), Lino (1995), Teyssedre et al (2000) ont amené à poser l'hypothèse selon laquelle le mouvement étant source de déséquilibre postural, son exécution nécessitait le maintien d'une posture compatible avec l'équilibre général du corps, et impliquait des ajustements posturaux qui, du fait des lois de la Mécanique, ne pouvaient s'organiser que par rapport aux appuis.
L'analyse des forces de réaction appliquées au niveau de l'épaule au tout début du mouvement intentionnel a permis de constater qu'elles avaient une direction opposée à celle enregistrée au niveau du centre de gravité du corps. Il a donc été proposé que les ajustements posturaux anticipateurs (APA) auraient pour effet de créer, dans le reste du corps, des forces d'inertie qui équilibreraient, le moment venu, les forces d'inertie dues au mouvement intentionnel, qui sont perturbatrices de l'équilibre postural. Dans la mesure où les APA sont programmés, il a été avancé l'hypothèse suivante : la programmation serait établie à partir d'une évaluation cognitive des effets perturbateurs que le mouvement volontaire projeté va avoir sur l'équilibre postural (Fig. 6).
Ces diverses propositions situent le cadre dans lequel les travaux expérimentaux de Simon Bouisset ont été menés. Ceux-ci s'appuient sur une méthodologie, qui est fondée sur la caractérisation biomécanique de la performance et l'enregistrement des phénomènes électromyographiques et biomécaniques qui constituent les expressions périphériques du mouvement.
Ajustements posturaux et plan de coopération entre muscles posturaux et focaux associés à un effort isométrique de poussée en absence et en présence de fatigue
La perturbation de l’équilibre du corps peut être statique, comme dans le port d’une charge, ou dynamique comme dans un mouvement de pointage. Dans le cas d’une perturbation dynamique, on peut supposer qu’elle ne puisse être compensée que par une contre-perturbation, dynamique également, et que la performance (vitesse ou force maximales, par exemple) doit être d’autant plus élevée que les segments posturaux sont plus accélérés. Si l’hypothèse de la Capacité Posturo-Cinétique a une portée générale, elle devrait s’appliquer aussi à la montée de force isométrique au cours de laquelle la force exercée augmente à chaque instant.
C’est la catégorie d’activité motrice que se sont proposés d’appréhender à partir des années 1995, Simon Bouisset et Serge Le Bozec, avec pour perspective d’étudier la programmation des ajustements posturaux associés à un effort isométrique, en l'absence et en présence de fatigue.
Ce thème de recherche a nécessité la mise en place de divers moyens instrumentaux et a utilisé le siège capteur de force 3D mis au point au laboratoire et décrit dans la thèse de Lino (1995), qui permet la mesure des forces de réactions aux appuis et du déplacement du centre des pressions. Les observations rapportées dans ce travail montrent que le corps est le siège de phénomènes posturaux dynamiques d’intensité croissante lors d’efforts isométriques d’intensité également croissante, et que la réduction de l'aire de contact a pour effet de favoriser la dynamique posturale, c'est à dire la Capacité Posturo-Cinétique et d'augmenter la performance.
D’un point de vue biomécanique, un acte moteur isométrique implique l’absence de mouvement focal au sens usuel du terme, c’est-à-dire de déplacement de la chaîne focale. Il correspond généralement, à un effort exercé par les membres supérieurs sur un objet fixe. La chaîne corporelle est, alors, fermée à ses deux extrémités : au niveau de l’objet et des appuis (Bouisset, 2002).
Gaughran et Dempster (1956) ont été les premiers à établir le bilan des forces extérieures au corps, et à montrer que la « force maximale volontaire synthétique », plus précisément, l’effort maximal qu’un sujet pouvait maintenir quelques secondes, en l’absence de fatigue était proportionnel à la distance horizontale qui séparait le centre de gravité du centre des pressions. Etant donné que la position du centre de gravité variait peu dans les diverses postures considérées, l’action musculaire avait pour effet principal de déplacer le centre des pressions et donc de faire varier la force de poussée (Fig. 7). Ces considérations ont été confirmés lors de l’analyse de montée de force maximale effectuée au cours d’une tâche de poussée, c’est-à-dire durant un effort isométrique anisotonique. (Le Bozec et al 1996, 1997, 1999), Bouisset et Le Bozec 1999, 2002, Bouisset et al 2002).
Des phénomènes dynamiques sont donc systématiquement associés aux montées de force isométriques. La mobilité de la chaîne articulaire posturale renforce la Capacité Posturo-Cinétique, et favorise la performance, aussi bien en condition isométrique qu’en condition anisométrique.
Les analyses biomécaniques ont permis de mettre en évidence des phénomènes dynamiques posturaux eux-mêmes d’intensité croissante, en fonction de la force produite. Ils siégeaient sur l’ensemble de la chaîne posturale et provenaient de l’activité phasique des muscles posturaux et focaux (Le Bozec et Bouisset 2004, Le Bozec et al 1997, Kantor et al 2001).
Un plan de coopération entre muscles focaux et muscles posturaux a été aussi mis en évidence lors de montées de force isométriques. La chronologie des activités musculaires est en faveur d’une mise en jeu disto-proximale progressant à partir des appuis podaux (Fig. 8). La diminution de l’appui ischio-fémoral, qui entraîne une augmentation du niveau d’excitation des muscles posturaux, se traduit par une force maximale de poussée plus importante. En conclusion, ces données montrent que les mêmes principes biomécaniques s’appliquent pour des efforts isométriques en présence ou en absence de fatigue. Ainsi, l’existence d’une dynamique anticipatrice se trouve attestée, et les ajustements posturaux suivent une gradation bien définie, même en présence de fatigue ou lors de l’adaptation respiratoire (Bouisset et al 2000, 2002), Bouisset et Le Bozec (2002), Le Bozec et Bouisset (2001, 2004), Le Bozec et al (2001, 2002), Kantor et al (2001). Par ailleurs, les résultats supportent le point de vue que le système nerveux central a la capacité d’adapter la dynamique posturale, en ajustant le rapport d’adhérence, en fonction du coefficient de frottement statique (COFs) et donc de contrôler le risque de glissement.
Ainsi, le rapport d’adhérence apparaît être une variable essentielle dans l’ajustement de la dynamique posturale avec une influence prioritaire par rapport aux effets engendrés par la réduction de l’aire de contact avec l’assise (Gaudez et al 2004, Bouisset et al 2006, Hamaoui et al 2007, Le Bozec et al 2008, Le Bozec et Bouisset 2009).
Les coordinations musculaires et les ajustements posturaux associés à l’initiation du premier pas ou à la locomotion.
Le mouvement qui consiste à se déplacer d’un endroit à un autre en marchant implique la participation de l’ensemble du corps, mettant ainsi en jeu un grand nombre de degrés de liberté du système et, par voie de conséquence, un nombre élevé de muscles impliqués dans les synergies qui sous-tendent les mouvements. Si marcher semble simple et facile (hors handicap), le mouvement de la marche correspond à un perpétuel état d’instabilité au cours duquel alternent des phases de perte et de rattrapage de l’équilibre. L’initiation de la marche correspond à la phase transitoire comprise entre deux états stables, la posture initiale et la marche stationnaire, période au cours de laquelle la synergie posturale s’efface et la synergie locomotrice se met en place, Brenière et Do (1987), Brenière et al. (1987), Do et al. (1991), Brenière (1996).
Il est maintenant acquis que pour créer les forces nécessaires à l’initiation du premier pas le système nerveux « se débrouille » pour créer un couple de déséquilibre par le jeu de décalage entre le centre de gravité (qui est très « inertiel » et le centre de pression (point d’application des forces, point sans inertie). Pour créer les forces de progression vers l’avant, le sujet active les fléchisseurs dorsaux (Tibialis Anterior) qui font reculer le centre des pressions (la base posturale se rétrécit) créant un décalage entre centre des pressions et centre de gravité. Il en résulte alors un couple de déséquilibre vers l’avant. Le même principe concerne le passage de l’appui bipodal à unipodal. Pour se mettre sur le pied droit, le sujet fait déplacer le centre des pressions vers le pied gauche, le couple de déséquilibre sera dirigé vers la droite (le centre de gravité va se placer du côté du pied droit. Ces phénomènes se déroulent avant l’exécution du pas, et sont appelés Ajustements Posturaux Anticipateurs. Ajustements : parce que les caractéristiques de ces phénomènes dépendent de celles du pas (vitesse, amplitude …).
Depuis lors, un nouvel aspect de ces études a été développé, et porte sur les Ajustements Posturaux Consécutifs (CPA) qui se produisent après la fin d’un mouvement volontaire. Les CPA peuvent-être considérés comme un moyen d’atteindre un nouvel équilibre postural «statique» dès que possible après le contact du pied, et d’obtenir une posture stable pour prévenir le risque de chute. Mémari et al. (2013), Fourcade et al (2018).
Conclusion
Les coordinations musculaires dans ces deux activités primordiales que sont la posture et la locomotion mettent en jeu un nombre important de muscles, et s’inscrivent dans la continuité des nombreux travaux que Simon Bouisset a mené tout au long de sa carrière sur les ajustements posturaux.
Les activités posturales comprennent le maintien d’une attitude corporelle donnée, mais aussi la stabilisation de celles-ci, c’est-à-dire le rétablissement de l’équilibre lors d’une perturbation, externe ou interne, comme l’exécution d’un mouvement intentionnel. Dans la locomotion, à l’activité alternante des membres inférieurs qui assurent la progression, s’ajoutent les nécessités de la stabilisation posturale, sollicitant l’activité des muscles du tronc et des membres supérieurs. Les travaux de Simon Bouisset sur la posture et les adaptations posturales font d’ailleurs référence dans le monde scientifique et en font un chercheur reconnu au niveau international.
Auteurs:
Serge Le Bozec, PREM
Manh-Cuong Do, PREM
Unité de recherche CIAMS
Université Paris-Saclay
Illustrations
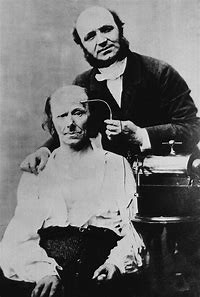
Fig. 1 : Duchenne de Boulogne (1806-1875) et son patient.
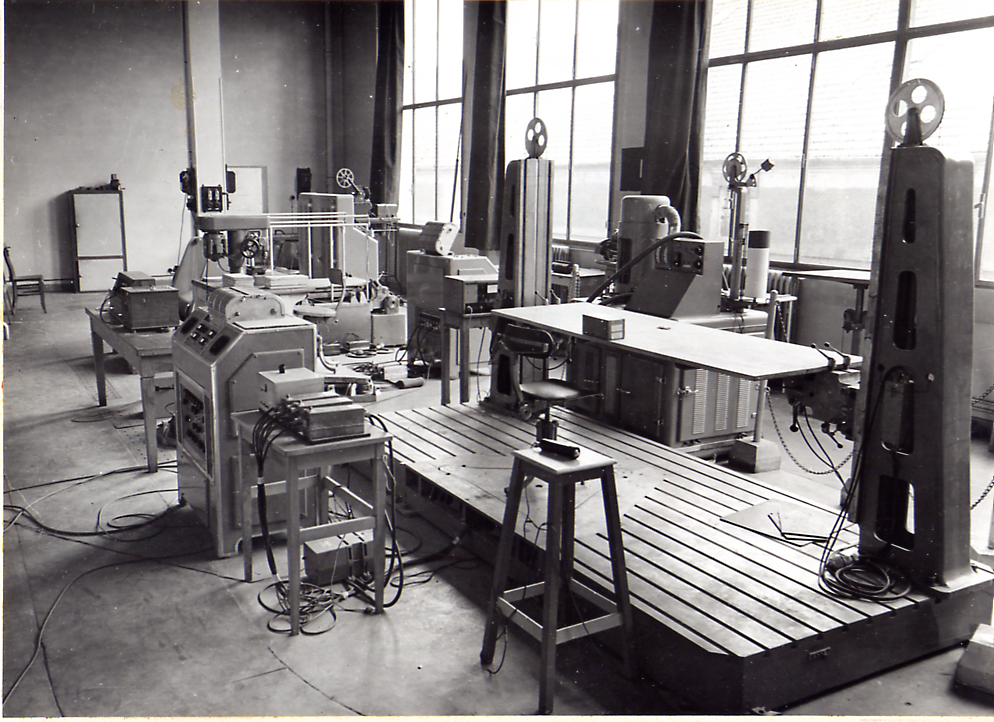
Fig. 2 : Laboratoire de Physiologie du Travail du CNAM créé par Camille Soula (1888-1963) et Centre d’Etudes Scientifiques de l’Homme du CNRS en 1958 : le piézodynamographe.
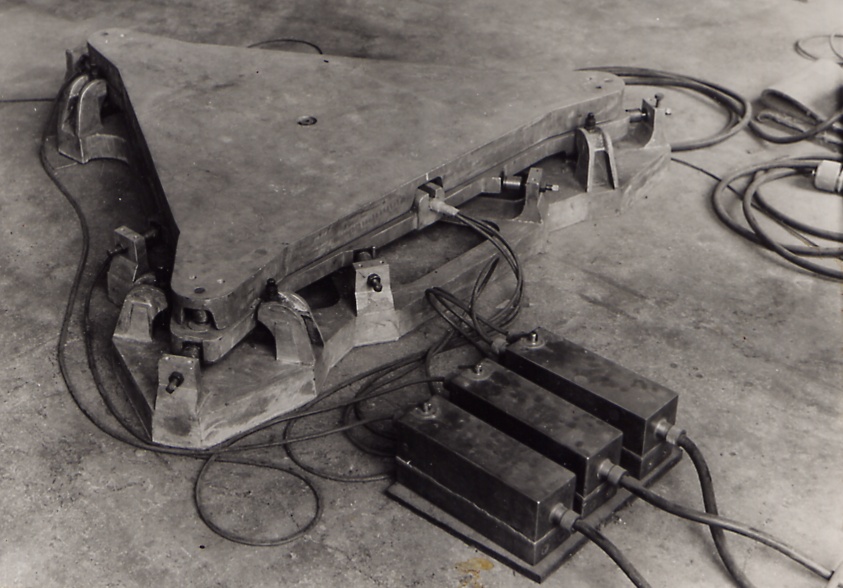
Fig. 3 : Plate-forme de force (Centre d’Etudes Scientifiques de l’Homme du CNRS).
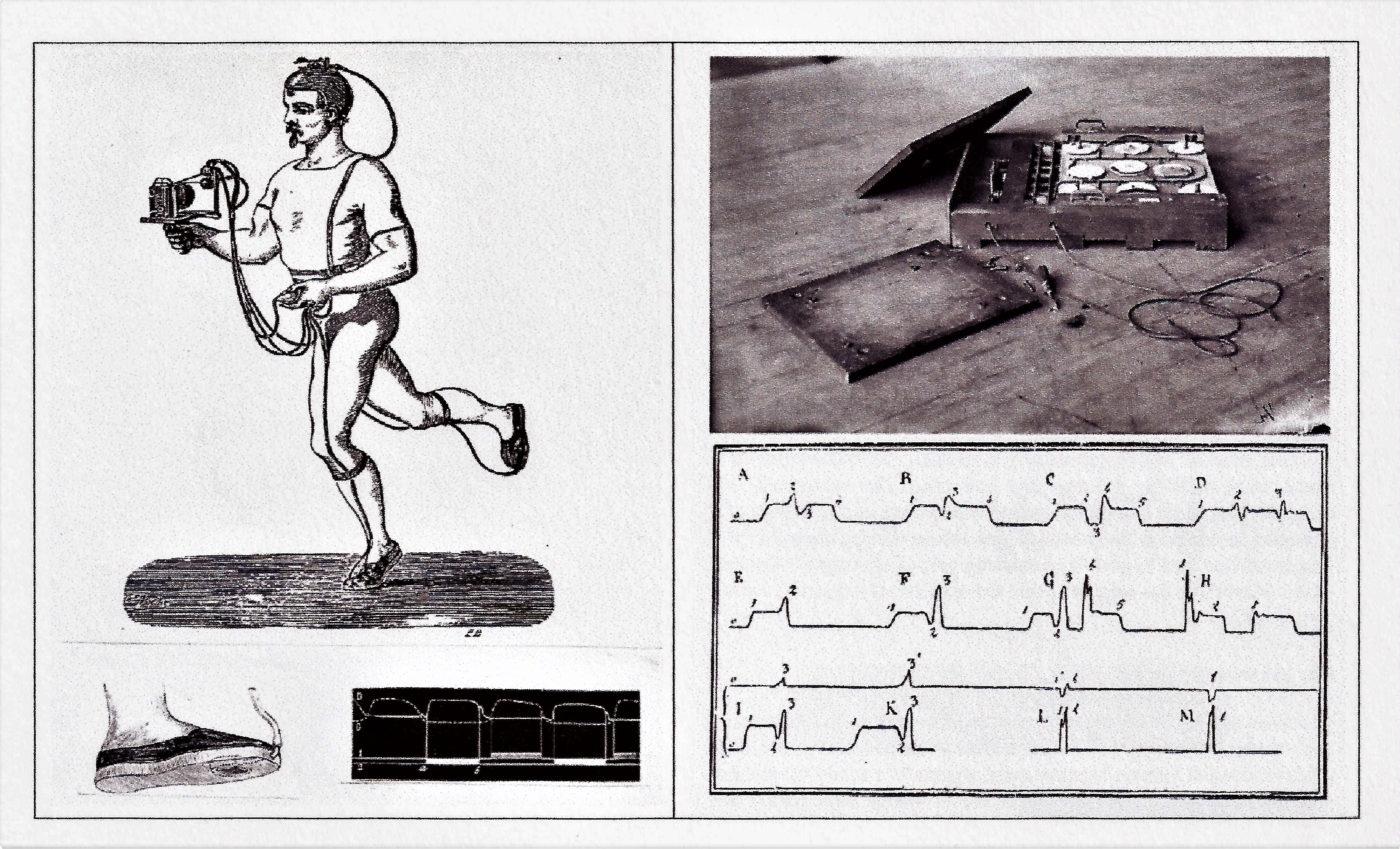
Fig. 4 : E.J. Marey et la dynamique. La méthode graphique (1878), La plate-forme Marey,
C.R. Acad. Sci, (1883).
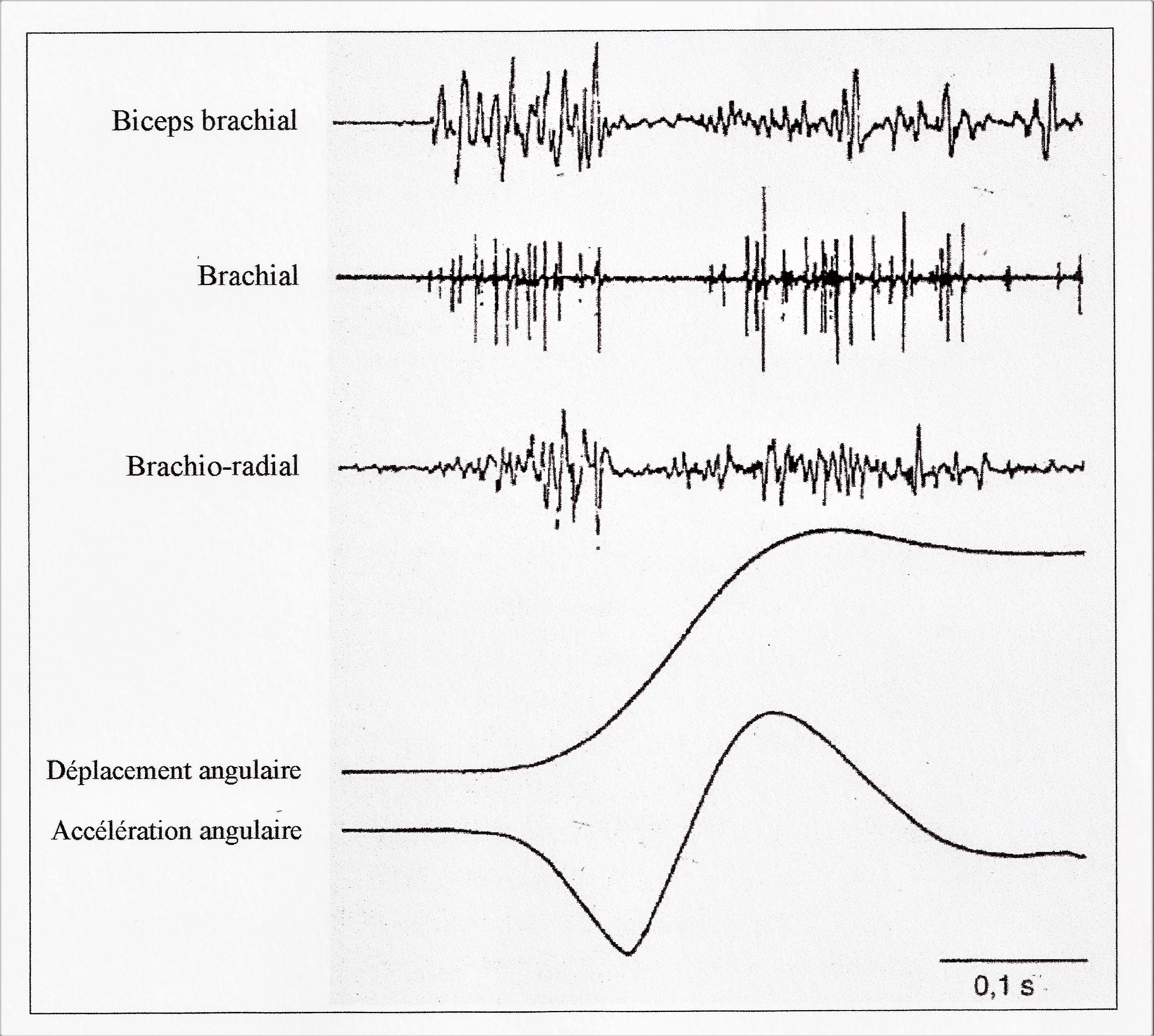
Fig. 5 : Enregistrement des EMG des muscles fléchisseurs du coude : Bouisset et al. (1977).
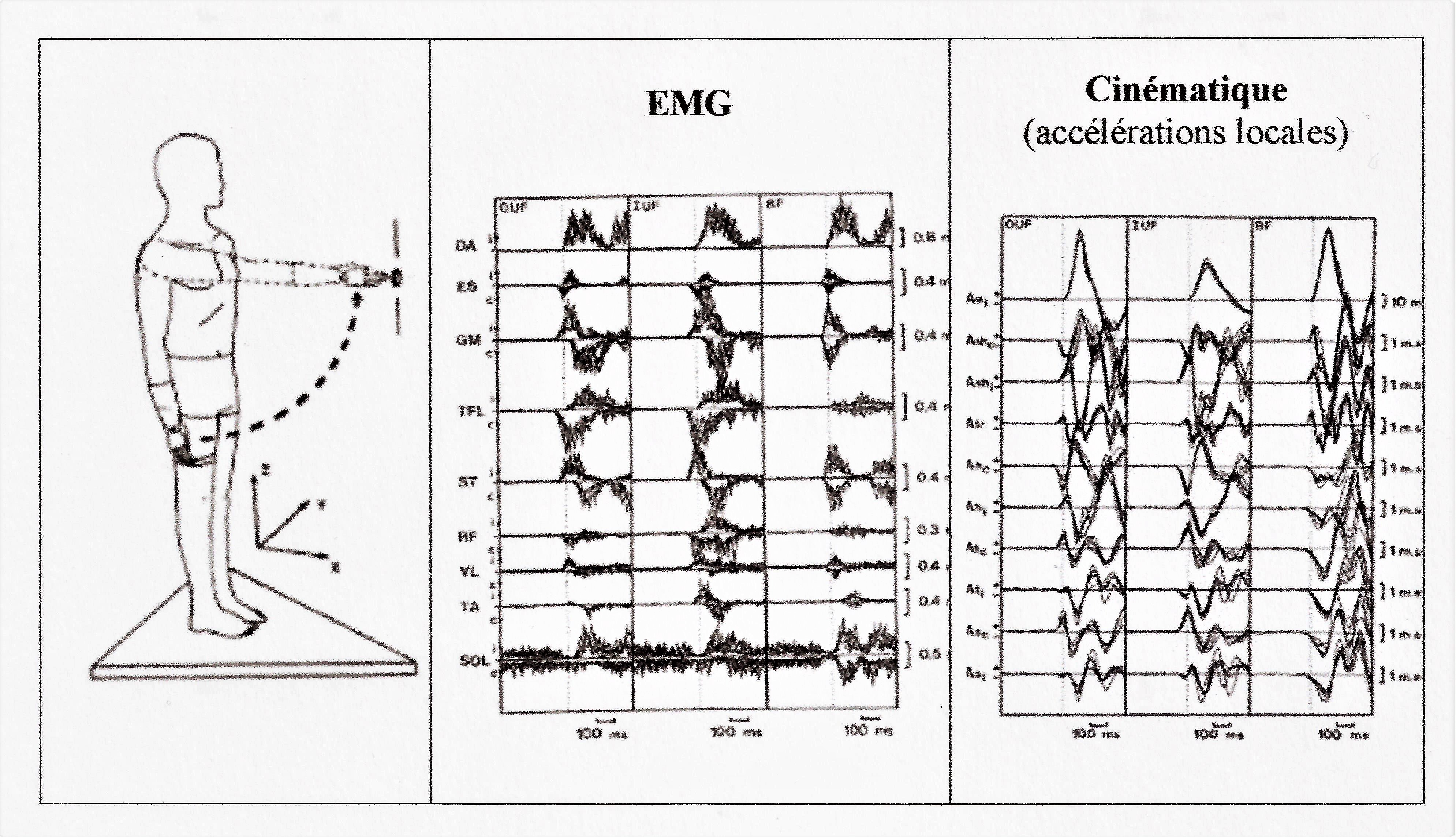
Fig. 6 : Activités des muscles des membres inférieurs et du bassin et accélérations locales associées au mouvement d’élévation du membre supérieur. Zattara et Bouisset, (1988).
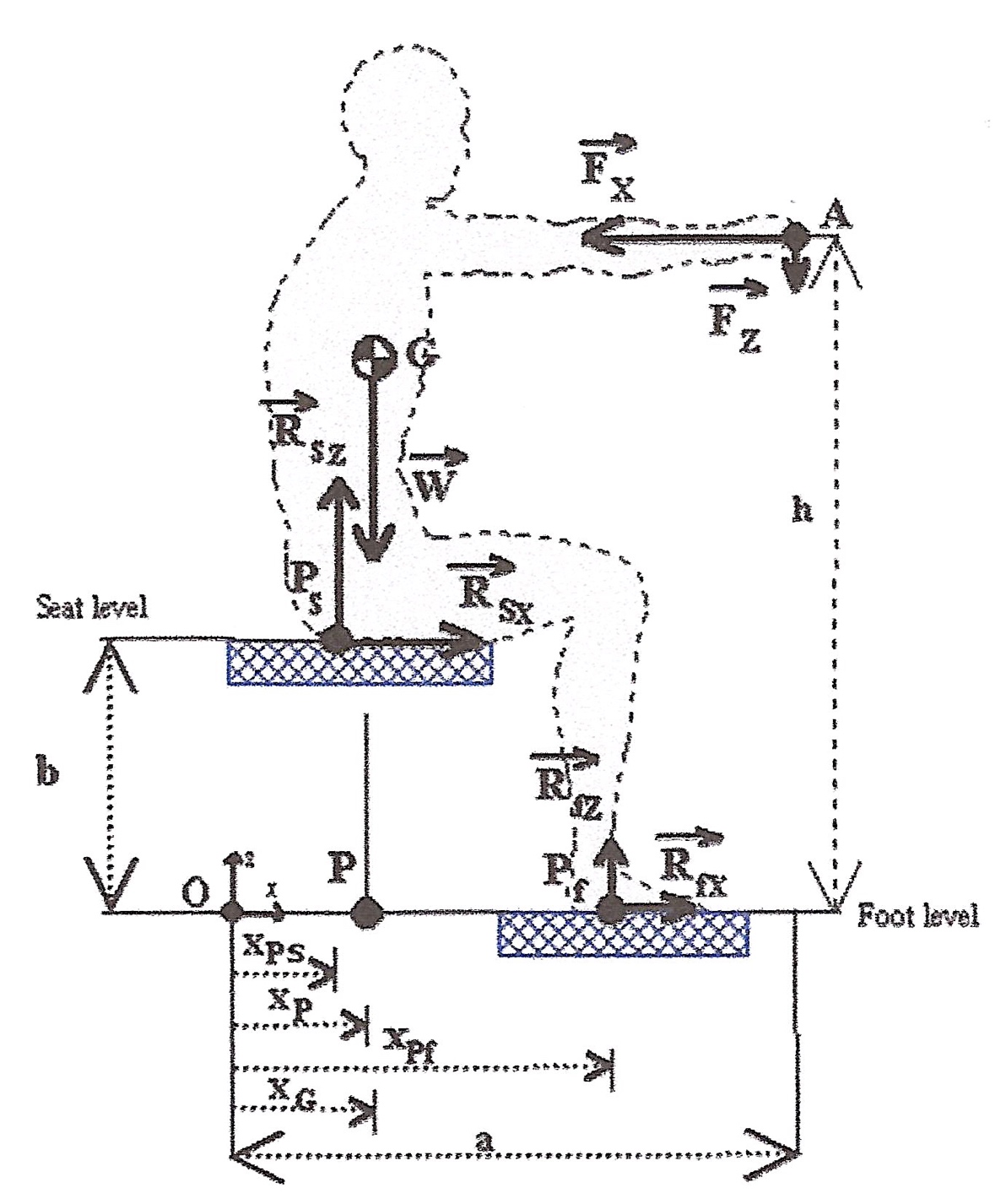
Fig. 7 : Modèle biomécanique de la poussée : Bouisset et al. (2002). Forces extérieures au corps dues à un effort isométrique de poussée. Le siège est composé d’une assise et de deux demi repose-pieds réglables en hauteur et en profondeur (Bouisset et al. 2002). Les trois surfaces d’appui sont chacune instrumentées avec des capteurs de force tridimensionnels. Composantes antéro-postérieure (Rsx) et verticale (Rsz) de la résultante des forces de réactions et coordonnée du centre des pressions le long de l’axe antéro-postérieur (Xps) pour la plate-forme assise.Composantes antéro-postérieure (Rfx) et verticale (Rfz) de la résultante des forces de réactions et coordonnée du centre des pressions le long de l’axe antéro-postérieur (Xpf) pour la plate-forme repose-pied. Composantes antéro-postérieure (Rx) et verticale (Rz) de la résultante des forces, et coordonnée du centre des pressions le long de l’axe antéro-postérieur (Xp) pour l’ensemble des trois plate-formes.
h : hauteur du point d’application de la force Fx. - G : centre de gravité du corps. W : poids du sujet - P : point d’application de Rz - O : origine des axes
mẍG = Fx + Rx
mz̈G = (RZ-W) + Fz
Rx=Rsx + Rfx
Rz = Rsz + Rfx
Xp = Xps + (Rsz/Rz) + Xpf (Rfx/Rz)
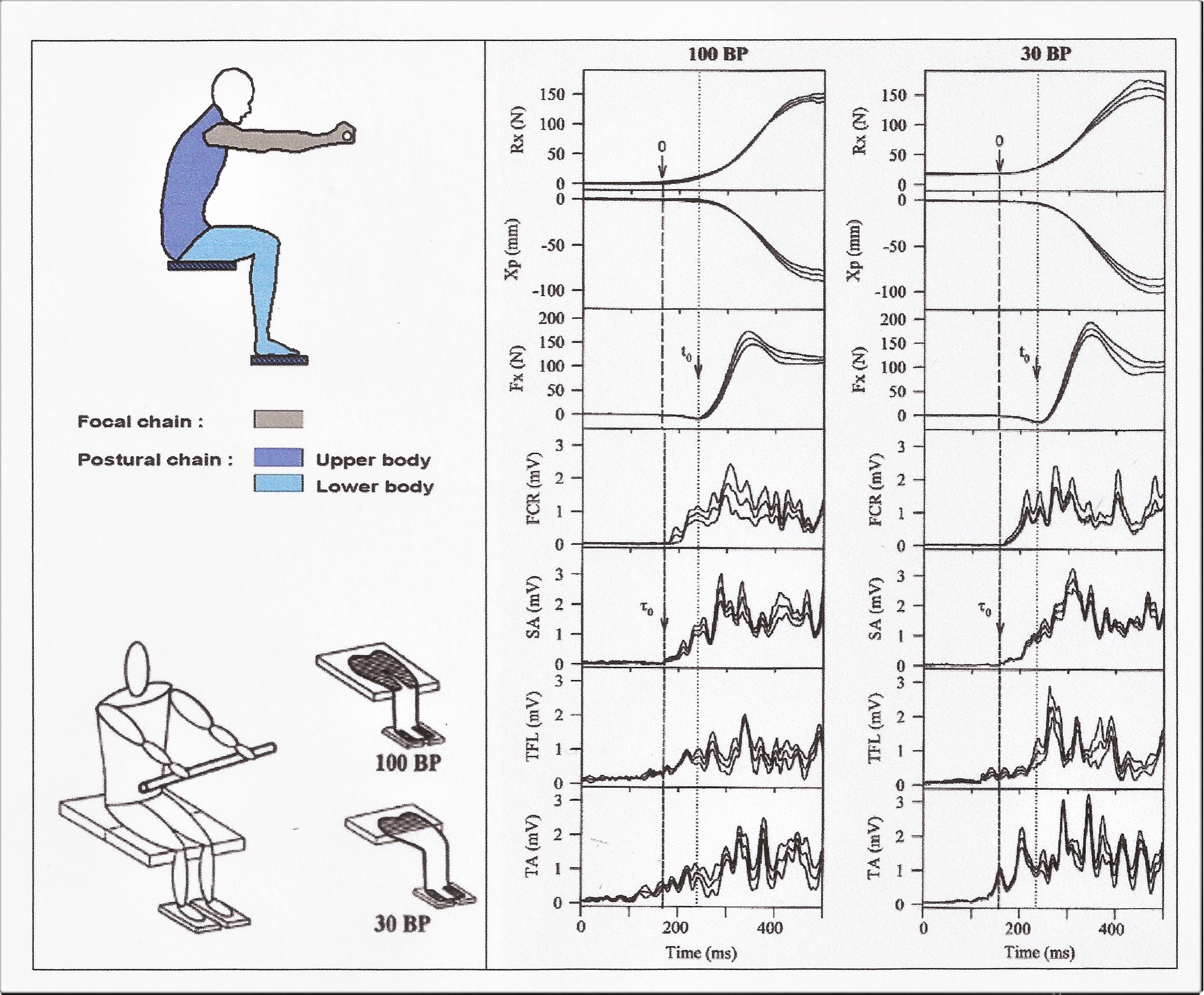
Fig. 8 : Activités EMG lors d’un effort isométrique maximal de poussée horizontale, exercé des deux mains sur une barre munie de capteurs de force. Deux conditions posturales ont été étudiées : 100% (100BP) et 30% (30BP) de la surface ischio-fémorale sont en contact avec l’assise (Le Bozec et Bouisset, 2004)