")
")

par S. Hinnekens
Les outils d’analyse cinématique et dynamique ont permis ces dernières années d’améliorer notre compréhension des mouvements du corps humain tant en recherche que pour des applications cliniques ou de performance sportive. De nombreux logiciels sont dès lors disponibles pour effectuer ces analyses, le choix étant laissé à l’utilisateur final. Robotran est un logiciel multicorps développé à l’Université catholique de Louvain (UCLouvain) depuis plus de 30 ans et adapté à de telles analyses.
Ses avantages sont multiples : (i) l’utilisateur a une prise en main et une maitrise complète de son modèle depuis sa création jusqu’à la production des résultats ; (ii) les équations du mouvement sont générées symboliquement, ce qui permet d’analyser des systèmes complexes dans un temps de calcul très court ; (iii) Robotran permet aisément l’ajout de degrés de liberté sur un modèle biomécanique déjà existant et ; (iv) le logiciel est multi-plateforme, multi-langages et librement utilisable pour la recherche et l’enseignement [1].
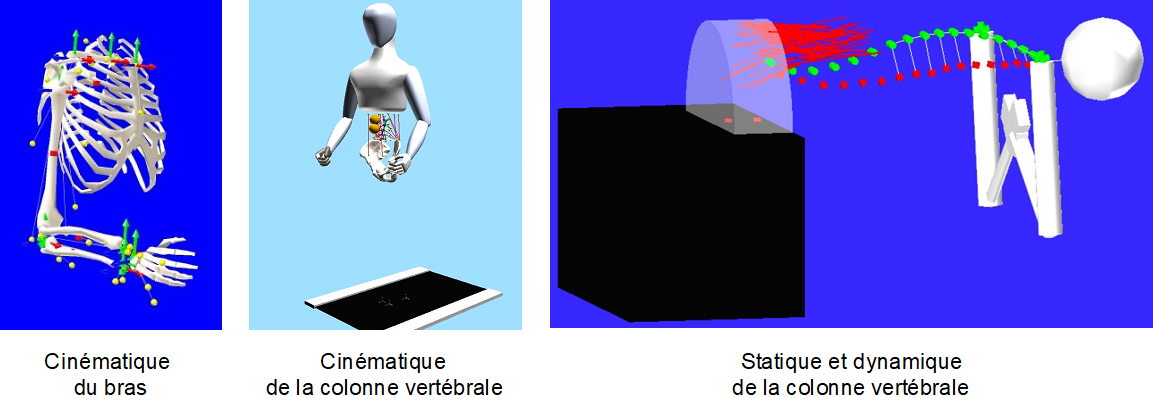
De gauche à droite : cinématique du bras (collaboration UCLouvain / Polytechnique Montréal, 2009) ; cinématique de la colonne vertébrale (UCLouvain, 2017) ; statique et dynamique de la colonne vertébrale dans la position du test de Sorensen (UCLouvain, 2021).
Applications cinématiques
Robotran a, par exemple, été utilisé par l’Institut Pprime de Poitiers (France) afin de calculer la cinématique d’avironneurs. L’objectif était de trouver une méthode alternative de capture du mouvement utilisant un nombre limité de capteurs, étant donné la complexité de capturer la cinématique des avironneurs dans des conditions réelles avec les caméras optoélectroniques classiques. Dans l’étude, il a été montré que Robotran pouvait retrouver la cinématique des sportifs de manière assez précise en exploitant la fermeture de la chaine cinématique bassin/jambe/pied/aviron [2].
À L’UCLouvain, la cinématique de la colonne vertébrale durant la marche a pu être calculée sur la base des marqueurs optocinétiques via une optimisation basée sur la cinématique inverse du modèle Robotran. Le modèle développé a ensuite servi de base au développement d’un outil de planification chirurgicale pour la pathologie de scoliose [3].
Applications dynamiques
Dans la lignée des recherches effectuées conjointement par l’UCLouvain et Polytechnique Montréal [4], un projet actuel s’intéresse à la quantification des efforts des muscles du tronc chez l’être humain ; et plus particulièrement, la quantification des forces développées par les muscles dorsaux lors de contractions isométriques dans la position du test de Sorensen (extension du tronc). Les modèles musculosquelettiques développés dans ce cadre sont alimentés des signaux EMG mesurés lors des expériences. Le but est de tirer un maximum d’information de ces signaux et donc de guider le modèle musculosquelettique et le calcul des forces musculaires. Les modèles permettent ensuite de calculer les efforts intervertébraux dans chaque disque de la colonne lombaire, objectif ultime de ce projet [5].
Publication
Site web : www.robotran.be
Références
[1] Docquier, N., Poncelet, A. & Fisette, P. (2013). ROBOTRAN: a powerful symbolic generator of multibody models. Mechanical Sciences, 4(1), 199-219.
[2] Retailleau, M., Fisette, P. & Colloud, F. (2019). A closed-loop multibody model to assess lower-limb kinematics in rowing. Computer Methods in Biomechanics and Biomedical Engineering, 22(sup1), S345-S347.
[3] Abedrabbo Ode, G. (20017). Quantification of intervertebral efforts using a multibody approach: application to scoliosis [dissertation]. Université catholique de Louvain.
[4] Raison, M., Laitenberger, M., Sarcher, A., Detrembleur, C., Samin, J. C., & Fisette, P. (2012). Methodology for the assessment of joint efforts during sit to stand movement. Injury and Skeletal Biomechanics, 1.
[5] Hinnekens, S., Mahaudens, P., Detrembleur, C., & Fisette, P. (2020). Quantification of abdominal and back muscles forces: calibration for the Sorensen test. Computer Methods in Biomechanics and Biomedical Engineering, (sup1), S142-S144.
L’auteur
 Simon Hinnekens est assistant de recherche à l’Université catholique de Louvain (Louvain-la-Neuve, Belgique) au sein de l’institut de Mécanique, Matériaux et Génie Civil (iMMC). Sa thèse de doctorat porte sur la quantification des efforts des muscles du tronc au moyen des modèles multicorps musculosquelettiques (Robotran) et des méthodes expérimentales non-invasives (signaux EMG, caméra tridimensionnelles, etc.).
Simon Hinnekens est assistant de recherche à l’Université catholique de Louvain (Louvain-la-Neuve, Belgique) au sein de l’institut de Mécanique, Matériaux et Génie Civil (iMMC). Sa thèse de doctorat porte sur la quantification des efforts des muscles du tronc au moyen des modèles multicorps musculosquelettiques (Robotran) et des méthodes expérimentales non-invasives (signaux EMG, caméra tridimensionnelles, etc.).
Copyright
© 2021 par l’auteur. Sauf mention contraire, le contenu du blog de la Société de Biomécanique (texte et figures) est distribué sous licence Creative Commons Attribution - Partage dans les mêmes conditions 4.0.