")
")

Par T. Valerio, lauréat de la bourse Collaborations de Recherche Jeune Chercheur.e 2022-2023.
L'articulation trapézométacarpienne (TMC) est l'une des articulations de la main les plus touchées par l'arthrose [1]. Des traitements chirurgicaux, tels que l'arthroplastie, la reconstruction ligamentaire ou la trapézectomie, sont parfois nécessaires pour traiter la douleur ou les limitations fonctionnelles induites par cette pathologie. Malheureusement, ces approches chirurgicales entraînent parfois des complications telles que la luxation de l'implant ou la déformation du pouce [2]. Bien que multifactorielles, ces complications sont associées à l'intensité et à la nature des chargements mécaniques appliquées aux articulations [3]. La modélisation biomécanique est une alternative pour comprendre ces chargements mécaniques internes et améliorer les traitements chirurgicaux. Néanmoins, les modèles biomécaniques actuels de l'articulation TMC [4], [5] intègrent rarement la spécificité du patient, en particulier les propriétés mécaniques des ligaments qui diffèrent considérablement selon le patient étudié [6], [7]. La modélisation patient-spécifique des ligaments de l'articulation TMC est donc nécessaire pour comprendre et améliorer les bénéfices de la chirurgie, étant donné leurs importance dans la stabilité de cette articulation [8]. L'objectif de cette étude était donc de créer des modèles éléments finis des ligaments de l'articulation TMC patient-spécifiques sur la base de données expérimentales in vitro [9].
Des modèles éléments finis patient-spécifiques des ligaments de l’articulation TMC ont été développés pour répondre à cette problématique (Figure 1). Des modèles 3D des os de l’articulation TMC (trapèze, premier et second métacarpe) ont été générés par segmentation à partir d’images scanner provenant de différents spécimens cadavériques. Les ligaments ont été ensuite modélisés à l’aide de ressorts, sur la base des dimensions des ligaments et de leurs zones d’insertion mesurées sur des spécimens cadavériques [10]. Les ligaments modélisés dans cette étude sont les cinq principaux ligaments identifiés dans les précédentes études cadavériques, à savoir : le ligament dorso-radial (DRL), le ligament oblique antérieur (AOL), le ligament oblique postérieur (POL), le ligament intermétacarpien (IML) et le ligament collatéral ulnaire (UCL). Les os ont été modélisés comme des corps rigides. Les ligaments ont été modélisés avec un comportement linéaire. Des forces dorso-palmaires et radio-ulnaires ont été appliquées sur l’os trapèze, pendant que l’os métacarpe restait fixé dans l’axe, de manière à reproduire numériquement l’expérimentation réalisée par l’Imperial College de Londres [9] et fait l’objet de cette collaboration de recherche. Les raideurs associées à chaque ligament ont été optimisées de manière à faire correspondre les courbes force-déplacement des modèles éléments finis avec celles observées expérimentalement. Les différents ligaments ont été coupés un par un dans l’expérimentation, ce qui a permis d’optimiser les raideurs spécifiques de chaque ligament dans cette présente étude. Les spécimens utilisés pour l’expérimentation étaient les mêmes que ceux utilisés pour l’élaboration des modèles 3D via images scanner [9]. Les modèles éléments finis ont été développés avec l’algorithme FEBio [11] et l’optimisation permettant d’estimer la raideur de chaque ligament a été réalisée avec l’algorithme de Levenberg-Marquardt, implémenté à l’aide d’un script python.
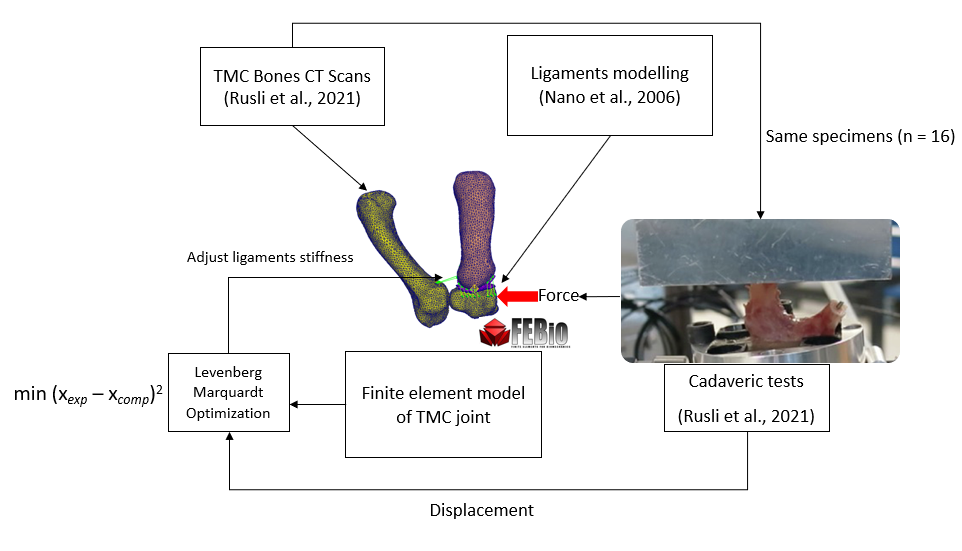 Figure : Approche utilisée dans cette étude pour le développement des modèles patient-spécifiques des ligaments de l’articulation trapézométacarpienne
Figure : Approche utilisée dans cette étude pour le développement des modèles patient-spécifiques des ligaments de l’articulation trapézométacarpienne
Les résultats préliminaires sur les premiers spécimens révèlent une raideur moyenne de 38.1 ± 36.4 N.mm-1 pour le ligament DRL, 85.5 ± 34.1 N.mm-1 pour le ligament IML, 21.9 ± 8.7 N.mm-1 pour le ligament POL, 19.3 ± 15.5 N.mm-1 pour le ligament UCL et 11.4 ± 0.0 N.mm-1 pour le ligament AOL.
Les raideurs estimées pour les ligaments DRL, POL et AOL sont cohérents avec celles retrouvées dans la littérature avec des essais en traction sur ces mêmes ligaments [6], [7]. La grande variabilité observée entre les raideurs des différents ligaments indique la nécessité d’individualiser ces paramètres pour modéliser ce type d’articulation de manière à élaborer des modèles fiables.
Les modèles numériques développés dans cette étude apportent des éléments cruciaux pour la prise en charge et la compréhension de l’arthrose de l’articulation TMC (rhizarthrose). Tout d’abord, les propriétés mécaniques personnalisées développées avec cette approche permettront une amélioration de la précision des modèles futurs, jusqu’à ce jour développés en utilisant des données moyennes issues de la littérature. Cela permettra de tester les différentes configurations ligamentaires à partir des différents modèles numériques élaborés. D’un point de vue clinique, des jumeaux numériques patient-spécifiques de différents traitements chirurgicaux (implants, trapèzectomies, ligamentoplasties, etc…) pourront être modélisés dans des études futures afin d’améliorer leurs efficacités en fonction du profil du patient.
Références
[1] S. Cvijetić, N. Kurtagić, et D. D. Ozegović, « Osteoarthritis of the hands in the rural population: a follow-up study », Eur. J. Epidemiol., vol. 19, no 7, p. 687‑691, 2004, doi: 10.1023/b:ejep.0000036794.40723.8e.
[2] M. Rouveyrol, J.-B. de Villeneuve Bargemon, P. Levet, J.-C. Mattéi, R. Legré, et C. Jaloux, « Revision of trapeziectomy failures in thumb base osteoarthritis: retrospective analysis of ten cases and review of the literature », Hand Surg. Rehabil., p. S2468122921001043, avr. 2021, doi: 10.1016/j.hansur.2021.03.014.
[3] Y. Lu, H. Xiao, et F. Xue, « Causes of and treatment options for dislocation following total hip arthroplasty (Review) », Exp. Ther. Med., juill. 2019, doi: 10.3892/etm.2019.7733.
[4] M. T. Y. Schneider et al., « Trapeziometacarpal joint contact varies between men and women during three isometric functional tasks », Med. Eng. Phys., vol. 50, p. 43‑49, déc. 2017, doi: 10.1016/j.medengphy.2017.09.002.
[5] M. Dong, F. Kerkhof, G. Deleu, E. Vereecke, et A. Ladd, « Using a finite element model of the thumb to study Trapeziometacarpal joint contact during lateral pinch », Clin. Biomech., vol. 101, p. 105852, janv. 2023, doi: 10.1016/j.clinbiomech.2022.105852.
[6] P. C. Bettinger, W. P. Smutz, R. L. Linscheid, W. P. Cooney, et K.-N. An, « Material properties of the trapezial and trapeziometacarpal ligaments », J. Hand Surg., vol. 25, no 6, p. 1085‑1095, nov. 2000, doi: 10.1053/jhsu.2000.18487.
[7] P. D’Agostino, F. D. Kerkhof, M. Shahabpour, J.-P. Moermans, F. Stockmans, et E. E. Vereecke, « Comparison of the Anatomical Dimensions and Mechanical Properties of the Dorsoradial and Anterior Oblique Ligaments of the Trapeziometacarpal Joint », J. Hand Surg., vol. 39, no 6, p. 1098‑1107, juin 2014, doi: 10.1016/j.jhsa.2014.02.025.
[8] M. Norose, A. Nimura, M. Tsutsumi, K. Fujita, A. Okawa, et K. Akita, « Anatomical study for elucidating the stabilization mechanism in the trapeziometacarpal joint », Sci. Rep., vol. 12, no 1, p. 20790, déc. 2022, doi: 10.1038/s41598-022-25355-3.
[9] W. M. R. Rusli et al., « Ligamentous constraint of the first carpometacarpal joint », J. Biomech., vol. 128, p. 110789, nov. 2021, doi: 10.1016/j.jbiomech.2021.110789.
[10] M. Nanno, W. L. Buford, R. M. Patterson, C. R. Andersen, et S. F. Viegas, « Three-Dimensional Analysis of the Ligamentous Attachments of the First Carpometacarpal Joint », J. Hand Surg., vol. 31, no 7, p. 1160‑1170, sept. 2006, doi: 10.1016/j.jhsa.2006.05.007.
[11] S. A. Maas, B. J. Ellis, G. A. Ateshian, et J. A. Weiss, « FEBio: Finite Elements for Biomechanics », J. Biomech. Eng., vol. 134, no 1, p. 011005, janv. 2012, doi: 10.1115/1.4005694.
L'auteur
 Thomas Valerio, Aix-Marseille Université
Thomas Valerio, Aix-Marseille Université
Thomas Valerio est titulaire d’un Master en Ingénierie et Ergonomie du Mouvement Humain à l’Université d’Aix-Marseille. Il prépare actuellement une thèse à l’Institut des Sciences du Mouvement avec le but d’investiguer les facteurs de risques de développement de la rhizarthrose ainsi que les possibilités d’améliorations des traitements chirurgicaux. Il développe pour cela des jumeaux numériques, couplés à des données expérimentales. Thomas a été lauréat de la bourse de collaboration de recherche pour les jeunes chercheurs de la Société de Biomécanique 2022.
Copyright
© 2023 par l’auteur. Sauf mention contraire, le contenu du blog de la Société de Biomécanique (texte et figures) est distribué sous licence Creative Commons Attribution - Partage dans les mêmes conditions 4.0.