")
")

Par Marianne Guesneau.
Les modèles multicorps permettent de simuler divers scénarios d'accidents et d'analyser les conditions d'impact sur le corps. Ces modèles sont souvent validés en reproduisant des crash-tests de mannequins ou cadavres, qui ne prennent pas en compte les réflexes de protection. Or dans le cas d’accidents à trottinette qui sont de plus en plus nombreux, la durée de l'événement, souvent d'environ une seconde, peut laisser le temps à l’utilisateur de sauter de sa trottinette, modifier sa trajectoire ou se protéger avec ses bras. Il est donc essentiel de confronter les résultats des modèles numériques à des accidents réels. Cette étude se penche sur la capacité d'un modèle multicorps à reproduire fidèlement la cinématique d'une chute de trottinette en reproduisant des accidents filmés. Deux cas sont analysés : une collision avec une voiture et une chute après avoir heurté une bordure de trottoir.
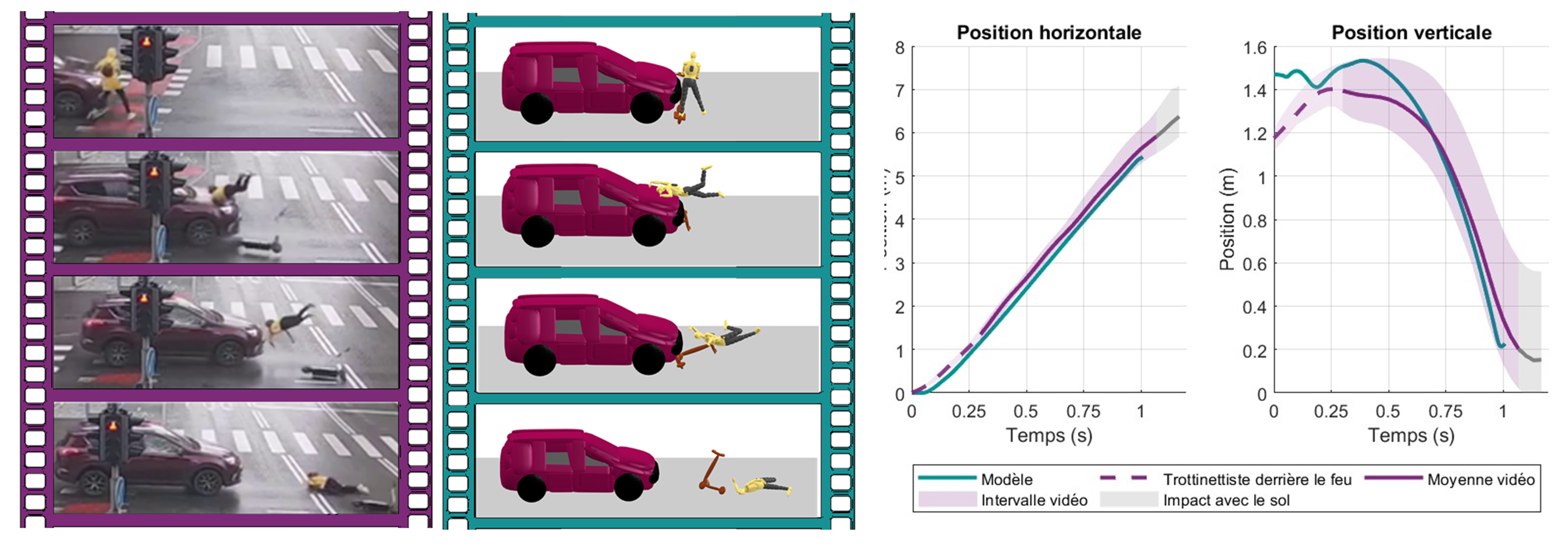
À l’aide du logiciel d’analyse vidéo Kinovea, nous avons extrait de deux vidéos d’accident les vitesses et les déplacements du trottinettiste et de la voiture tout au long de l’accident. Les deux accidents ont été reproduit en utilisant un modèle multicorps. Ce modèle représente de façon simplifié la voiture, la trottinette et le corps humain. La cinématique et le comportement mécanique de chacune de ces parties du modèle ont été précédemment validés grâce à des essais cadavérique et mannequins (Cherta Ballester et al., 2019; Fournier, Bailly, Schäuble, & Petit, 2023; van Hoof, de Lange, & Wismans, 2003). Afin d’évaluer si le modèle est capable de reproduire correctement les deux accidents capturés en vidéos, les déplacements du dos et de la tête du modèle de trottinettiste ont été comparés aux mesures de la vidéo.
Dans le cas de la collision entre voiture (roulant à 27 km/h) et trottinette (7 km/h), notre modèle renvoie une vitesse d’impact de la tête contre le sol de 27 km/h, ce qui est bien plus rapide que la vitesse d’impact de 13 km/h lors de la chute du trottinettiste (roulant à 15km/h) contre le trottoir. Pour la collision avec la voiture, la distance de chute était selon notre modèle de 5.3 m et pour la chute contre trottoir de 2.7 m. L’erreur de déplacement entre la vidéo et la simulation était en moyenne de 0,14m pour la collision avec voiture et 0.21 m pour la chute seul. Dans les deux vidéos, aucun mécanisme de protections reflexe n’est visible cependant de légères différences de posture peuvent être observées pendant la chute entre les vidéos et le modèle (voir la figure ci-dessous).
Ainsi, notre étude renforce la confiance que l’on a dans ce modèle multicorps tout en mettant en exergue ses limites : la cinématique globale est respectée mais les mouvements liés au tonus musculaire ne sont pas représentés. Dans de prochains travaux nous comptons nous intéresser aux effets de la vitesse et de la position des véhicules sur la cinématique de la chute et le risque de blessures. A terme, il serait intéressant d’étudier comment implémenter le tonus musculaire et les réflexes dans les modèles d’humain multicorps.
Références
Cherta Ballester, O., Llari, M., Afquir, S., Martin, J.-L., Bourdet, N., Honoré, V., … Arnoux, P.-J. (2019). Analysis of trunk impact conditions in motorcycle road accidents based on epidemiological, accidentological data and multibody simulations. Accident Analysis & Prevention, 127, 223–230. doi: 10.1016/j.aap.2019.03.006
Fournier, M., Bailly, N., Schäuble, A., & Petit, Y. (2023). Head impact kinematics and injury risks during E-scooter collisions against a curb. Heliyon, 9(9), e19254. doi: 10.1016/j.heliyon.2023.e19254
van Hoof, J., de Lange, R., & Wismans, J. S. H. M. (2003). Improving pedestrian safety using numerical human models. Stapp Car Crash Journal, 47, 401–436. doi: 10.4271/2003-22-0018
Publication
Guesneau M., Cherta Ballester O., Arnoux P.-J., Honoré V., Bailly N. (2024). Can a multibody model accurately replicate real e-scooter crashes? Multidisciplinary Biomechanics Journal
L’auteure

Marianne Guesneau, LBA UMRT24, Aix Marseille Université/Université Gustave Eiffel-IFSTTAR, Marseille, IN&MOTION S.A.S., Annecy.
Doctorante CIFRE et titulaire d'un diplôme d’ingénieur et master en biomécanique et bio-ingénierie de l'Université de technologie de Compiègne, Marianne Guesneau travaille sur le développement et l’amélioration de protections airbag pour les cyclistes et trottinettistes. En modélisant des accidents elle étudie les conditions d’impacts et mécanismes de blessure associés.
Copyright
© 2025 par l’auteur. Sauf mention contraire, le contenu du blog de la Société de Biomécanique (texte et figures) est distribué sous licence Creative Commons Attribution - Partage dans les mêmes conditions 4.0.