")
")

Par Nahime Al Abiad.
Chez l’homme, le maintien de la position debout lors d’activités dynamiques reste encore mal compris. Précisément, l’instabilité lors de la locomotion bipède et l’évaluation du risque de chutes restent des questions ouvertes à la croisée de plusieurs disciplines telles que la robotique ou la biomécanique.
Plusieurs indicateurs tels que le centre des pressions ont déjà été proposés dans la littérature pour quantifier ces risques de chutes. Il a, par exemple, été proposé que le centre des pressions doit, rester à la verticale du polygone support constitué par la surface convexe constitué par la surface d’appui des deux pieds au sol afin d’éviter le risque de chutes. Toutefois, la majorité de ces critères sont très difficilement quantifiables en temps réel et rendent ainsi leurs utilisations difficiles voire impossibles pour prévenir l’instabilité. Récemment, nous avons proposé un critère basé sur la distance
Plusieurs indicateurs ont déjà été proposés dans la littérature pour quantifier ces risques de chutes. Il a, par exemple, été proposé que le centre des pressions doit, rester à l’intérieur du polygone de sustentation constitué par la surface convexe formée par la surface d’appui des deux pieds au sol. Toutefois, la majorité de ces critères sont très difficilement quantifiables en temps réel et rendent ainsi leur utilisation difficile voire impossible pour prévenir l’instabilité. Récemment, nous avons proposé un critère basé sur la distance dCoM-Δ entre le Centre de Masse (CdM) du sujet l’axe central du torseur des actions mécaniques de contact (1). Cette étude propose ainsi de caractériser le comportement de ce descripteur lors de la locomotion pour des populations à risques lors d’un cycle de marche.
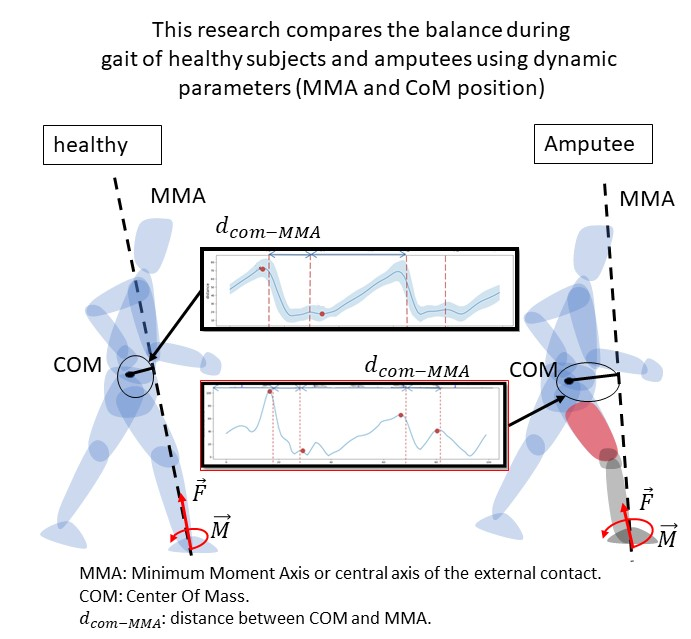 Cinq sujets amputés fémoraux et quatorze sujets sains ont participé à cette étude consistant à analyser la distance dCoM-Δ lors de la locomotion sur sol plat. La cinématique tridimensionnelle corps-complet a été enregistrée pour localiser la position du centre de masse et l’utilisation de plateformes de force a permis la mesure du torseur des actions mécaniques extérieures. Les sujets ont effectué plusieurs cycles de marche à vitesses spontanées. Le profil de la distance dCoM-Δ lors du cycle complet de marche a alors été analysé et plusieurs paramètres caractéristiques ont été étudiés (maximum dCoM-Δ, minimum dCoM-Δ, moyenne dCoM-Δ…).
Cinq sujets amputés fémoraux et quatorze sujets sains ont participé à cette étude consistant à analyser la distance dCoM-Δ lors de la locomotion sur sol plat. La cinématique tridimensionnelle corps-complet a été enregistrée pour localiser la position du centre de masse et l’utilisation de plateformes de force a permis la mesure du torseur des actions mécaniques extérieures. Les sujets ont effectué plusieurs cycles de marche à vitesses spontanées. Le profil de la distance dCoM-Δ lors du cycle complet de marche a alors été analysé et plusieurs paramètres caractéristiques ont été étudiés (maximum dCoM-Δ, minimum dCoM-Δ, moyenne dCoM-Δ…).
Les résultats ont montré que les deux groupes de sujets présentent des profils de dCoM-Δ significativement différents alors même que chez les personnes amputées les profils observés en considérant chacun des membres inférieurs (amputé ou controlatéral) présentent eux aussi des résultats différents. Ainsi, de tous les paramètres étudiés, un seul ne présente pas de différence significative (moyenne dCoM-Δ…). Ainsi, les personnes amputées semblent en capacité de limiter la distance moyenne malgré une évolution temporelle significativement différente. Ce résultat reste cohérent avec la capacité des sujets amputés à maintenir une locomotion bipède même si le profil entre les deux membres inférieurs (amputé et controlatéral) reste très asymétrique et met en avant un potentiel risque d’instabilité plus prononcé que chez les sujets non amputés.
In fine, cette étude a mis en lumière la capacité du descripteur à discriminer une population présentant un risque d’instabilité lors de la locomotion. Ces résultats permettent d’envisager l’étude du risque de chutes dans de nombreuses configurations (vieillissement, prothèses, exosquelettes, …). C’est aussi un descripteur intéressant à mettre en œuvre dans le cadre de la génération de mouvement des robots humanoïdes.Publication
Al Abiad, N., Pillet, H., & Watier, B. (2020). A Mechanical Descriptor of Instability in Human Locomotion: Experimental Findings in Control Subjects and People with Transfemoral Amputation. Applied Sciences, 10(3), 840. MDPI AG. http://dx.doi.org/10.3390/app10030840
L’auteur

Nahime Al Abiad
Laboratoire d’Analyse et d’Architecture des Systèmes (LAAS-CNRS), Université de Toulouse, CNRS, UPS, 31031 Toulouse, France;
L’intérêt que je porte à la biomécanique humaine m'a conduit vers une carrière évoluant autour de l'équilibre humain et de l'instabilité. Cet article est le résultat d'un stage que j'ai effectué au LAAS-CNRS. Actuellement, je poursuis un doctorat au LBMC-Université Gustave Eiffel sur l'utilisation d'appareils non dédiés pour quantifier les risques de chute chez les personnes âgées. Je travaillerai avec des unités de mesure inertielles présentes dans des appareils non dédiés pour évaluer des indicateurs du risque de chute de la personne .
Copyright
© 2020 par l’auteur. Sauf mention contraire, le contenu du blog de la Société de Biomécanique (texte et figures) est distribué sous licence Creative Commons Attribution - Partage dans les mêmes conditions 4.0.